Zuverlässige Vernetzung der Steuerungssysteme im Fahrzeug
Das CAN-Bus-System ist das Standard-Bus-System für Kraftfahrzeuge und ermöglicht die Vernetzung und den Datenaustausch zwischen den verschiedenen Steuergeräten des Fahrzeugs. CAN steht für Controller Area Network und ermöglicht Datenübertragungen bis zu 1 Mbit/Sekunde. Das System bietet im Gegensatz zur klassischen Verkabelung bessere, einheitlichere Kommunikationsmöglichkeiten.
Warum ist CAN-Bus wichtig?
Je moderner ein Auto, desto umfangreicher sind die darin enthaltenen elektronischen Systeme, z.B. für die Fahrsicherheit, Getriebe-Steuerung oder Multimedia-Technik. Durch diesen Zuwachs an Elektronik müssen auch immer mehr Informationen im Fahrzeug ausgetauscht werden. Daher entwickelte die Firma Bosch in den 80er Jahren ein System, das die zunehmende Menge an Kabeln und Verknüpfungen reduzieren sollte – den CAN-Bus. Damit wurde nicht nur das überdimensionierte Kabelwirrwarr beendet, die einzelnen Steuergeräte konnten nun über die gleiche Sprache kommunizieren.
Während bei einer herkömmlichen Verkabelung für jede Information eine Leitung erforderlich ist, benötigen Fahrzeuge mit CAN-Bus lediglich zwei Leitungen, über die die Sensoren oder Steuergeräte miteinander vernetzt werden. So erhalten alle Systeme einen Datenaustausch über eine einheitliche Plattform. Mit dem CAN-Bus lassen sich bis zu 100 Steuermechanismen verbinden.
Die Vorteile des CAN-Bus im Überblick:
- reduzierte Kabelmenge/weniger Verkabelungsaufwand
- mehrfach nutzbare Sensoren
- erweiterte Kommunikationsfähigkeit
- geringeres Gewicht
- geringerer Preis
- Diagnosekomponenten ermöglichen Kontrolle der Systeme und leichte Fehlererkennung
- keine Probleme bei Ausfall einer CAN-Station – kein Einfluss auf Funktionsweise der anderen CAN-Stationen
Wie funktioniert ein CAN-Bus?
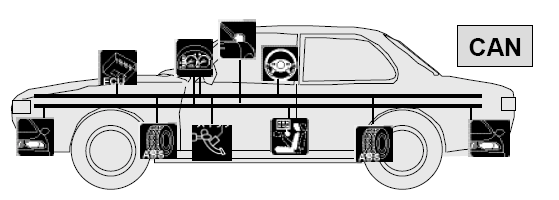
Jedes Steuergerät ist mit jedem anderen Steuergerät über den CAN-Bus verbunden. Daher werden Informationen, die von einem Steuergerät ausgehen, an jede Schnittstelle weitergeleitet, sodass jedes Steuergerät darauf zugreifen kann. Für wen die Information relevant ist, wird im CAN-Bus über Identifier geregelt. Dabei erfolgt die Datenverarbeitung nach einer strikten Reihenfolge. Die Abläufe bei der Übertragung, der Bestätigung oder der Fehlersicherung sind genau spezifiziert.
Ein Beispiel:
Die Getriebesteuerung sendet eine Geschwindigkeit von 120 km/h. Dieses Signal bekommt auch das Radio mit, das entsprechend seine Lautstärke erhöht. Zugleich ist das Geschwindigkeitssignal für den Tempomat relevant. Er prüft, ob diese Geschwindigkeit dem eingestellten Soll-Wert entspricht.
Allerdings ist die Kapazität bei der Datenübertragung begrenzt. Das wird über den 2-strangigen Aufbau des CAN-Bus gelöst: In dem einen Strang werden die Daten schneller, in dem anderen langsamer transportiert. So ist es bspw. wichtig, dass Motordaten sehr schnell kommuniziert werden, während Informationen an die Klimaanlage langsamer übertragen werden können.
Bildquelle: Florent.david.lille1 – Wikimedia Commons
{kind=link}